 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMolMole: Molecule Mining from Scientific Literature
May 08, 2025The extraction of molecular structures and reaction data from scientific documents is challenging due to their varied, unstructured chemical formats and complex document layouts. To address this, we introduce MolMole, a vision-based deep learning framework that unifies molecule detection, reaction diagram parsing, and optical chemical structure recognition (OCSR) into a single pipeline for automating the extraction of chemical data directly from page-level documents. Recognizing the lack of a standard page-level benchmark and evaluation metric, we also present a testset of 550 pages annotated with molecule bounding boxes, reaction labels, and MOLfiles, along with a novel evaluation metric. Experimental results demonstrate that MolMole outperforms existing toolkits on both our benchmark and public datasets. The benchmark testset will be publicly available, and the MolMole toolkit will be accessible soon through an interactive demo on the LG AI Research website. For commercial inquiries, please contact us at \href{mailto:contact_ddu@lgresearch.ai}{contact\_ddu@lgresearch.ai}.
A flow disturbance estimation and rejection strategy of multirotors with round trip trajectories
Mar 06, 2020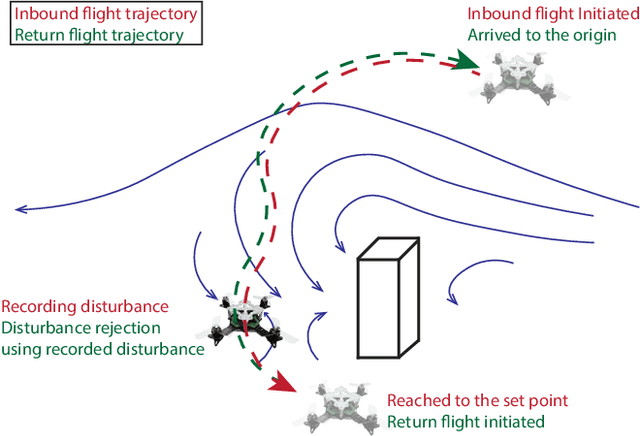
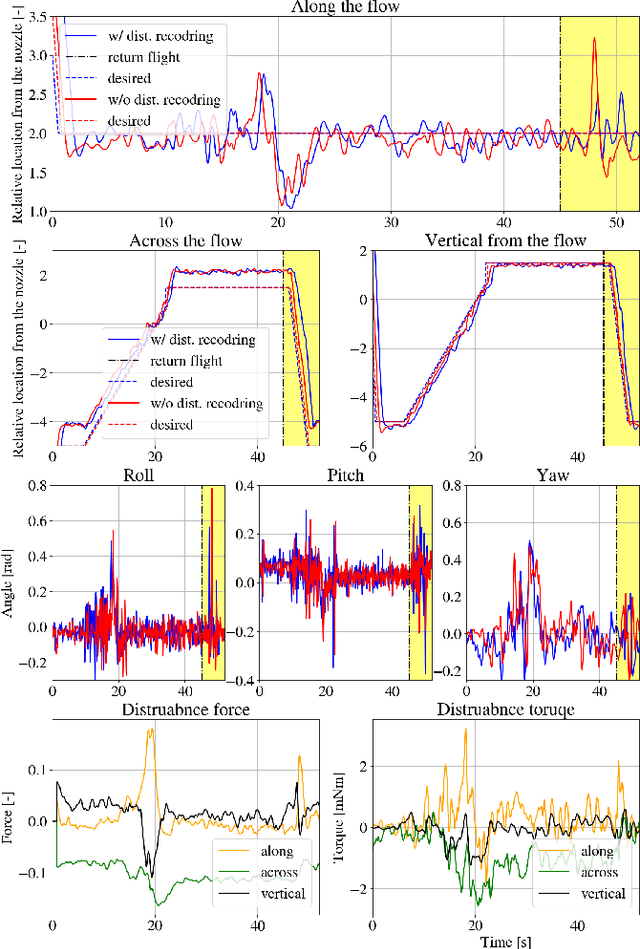
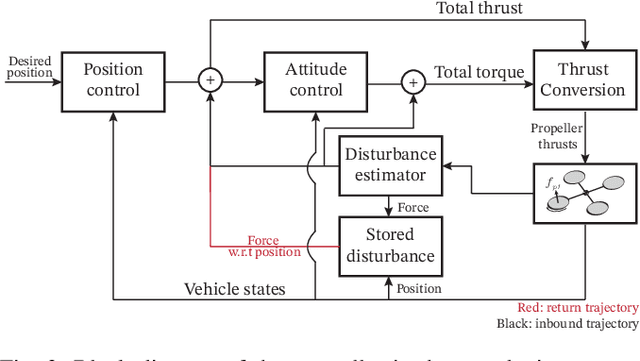
This paper presents a round trip strategy of multirotors with unknown flow disturbances. The method is designed to decrease flight time for return trips, while the safety is ensured. The disturbance force and torque estimation model is derived from the onboard inertial measurement unit (IMU) sensor data. The estimation made during the previous time step is used as feedforward thrust and torque during the inbound trip, and the disturbances are recorded for the feedforward inputs of the return trip. As a demonstration of the capabilities for this approach, static point and repetitive trajectory experiments are shown along with a comparison against a conventional PD controller. The benefits of this round trip strategy is further verified by multiple experiments. Faster return trip velocity is obtained with small position errors. We also confirm drastically reduced position errors along the flow direction.
Predictive Control for Chasing a Ground Vehicle using a UAV
May 22, 2019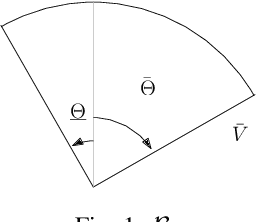
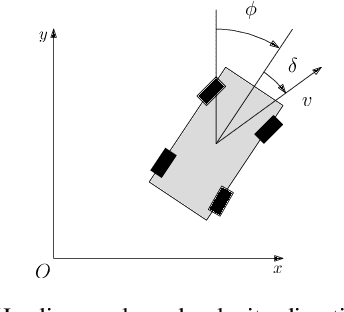
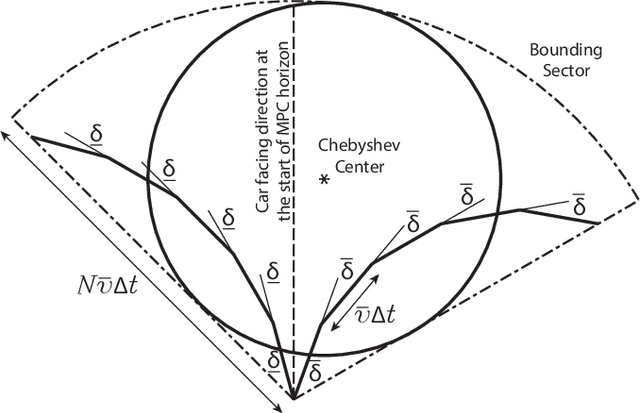
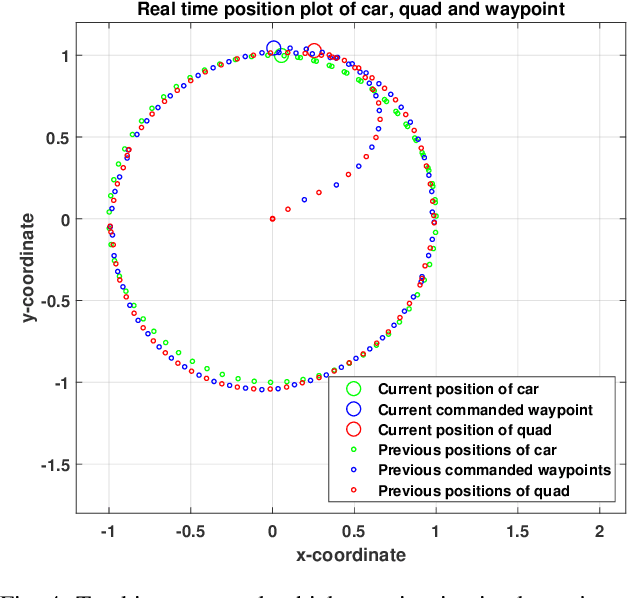
We propose a high-level planner for a multirotor to chase a ground vehicle, while simultaneously respecting various state and input constraints. Assuming a minimal kinematic model for the ground vehicle, we use data collected online to generate predictions for our planner within a model predictive control framework. Our solution is demonstrated, both via simulations and experiments on a stable quadcopter platform.